所属公司:广州精拓电子科技有限公司
联系地址:广东省广州市白云区广州市白云区田心大道8号三楼
主营行业:360全景影像|防碰撞预警系统|安全辅助驾驶系统|疲劳驾驶预警系统
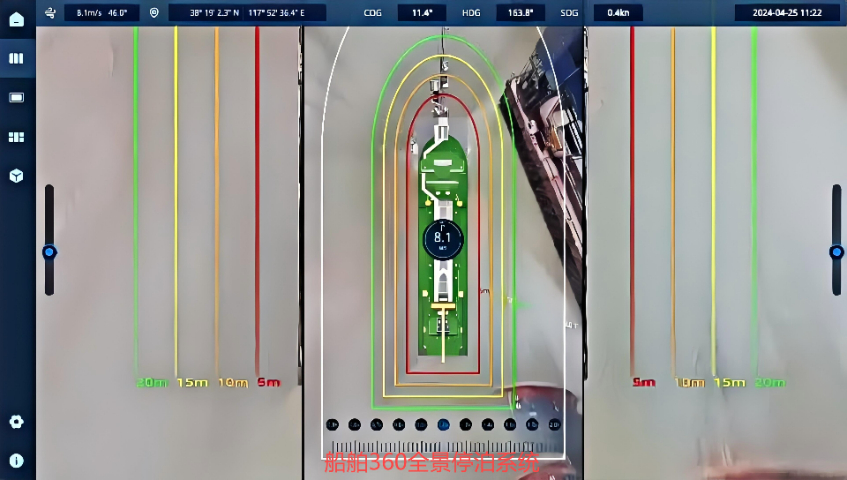
360度全景影像系统的功能:360度全景影像,可视360度全景行车辅助系统通过四路高清摄像头,为车主提供360度无死角的全景视野。经过主机的处理,将摄像头拍摄到的图像拼接、矫正还原后,通过车载dvd清晰自然的呈现给驾驶员,帮助驾驶员掌握车身周围所有路况,及时作出正确的判断。操作灵活多样,当挂倒车档时,自动切换后视模式,不需要另外手动操作。左侧显示的是车身周围所有的场景图像,右侧是后视模式。如果不习惯这种左全景,右但视角模式,可以再系统中修改显示方式:左边但视角,右边全景视角。多种启动方式:可以按薄膜按键启动,可以双击按键启动,不同的启动方式可以让你随心所欲。360度全景是通过对专业相机捕捉整个场景的图像信息,使用软件进行图片拼合。渣土车8路360全景影像系统销售
360°全景影像究竟实用吗?它是一种帮助我们提高安全的配置。因为每辆车都有不同的盲区,即使老司机也有湿鞋的时候,一时疏忽而造成事故的情况比比皆是。而装配了360°全景影像的车型,可以用安装在车身周围前后左右的四个摄像头、拍摄180度范围的广角摄像头来采集整个车身360度范围的景象,并且将四个摄像头拍摄到的画面融合之后,显示在原车的导航屏幕上。有了这样的神助攻之后,车主倒车或者行驶在狭小的区域内,除了直觉之外,还可以通过观察导航屏幕的360度全景影像来做出正确的判断,车身周围的所有视野盲区全部可以看见,避免意外的发生。总的来说,对于360°全景影像,我个人认为非常使用,有助于帮助我们行车更加安全。渣土车8路360全景影像系统销售汽车360全景影像是什么?

(下篇)车载红外热像仪在AI360全景影像系统中的应用,为现代汽车的驾驶安全和智能化提供了强有力的支持。以下是对这一应用的详细分析:
行人及车辆智能识别:结合AI算法,红外热像仪能更准确地识别行人和车辆,特别是在夜间或视线不佳的情况下。
及时发出警告以避免碰撞。发动机及动力系统监测:红外热像仪可用于监测发动机及动力系统的温度分布,帮助工程师了解发动机工作状态。这有助于及时发现潜在故障,提高车辆维护效率。动力电池健康评估:随着电动汽车的普及,红外热像仪可用于评估动力电池的健康情况。通过温度异常排查故障点,提高电动汽车的安全性和可靠性。多传感器融合与协同工作:车载红外热像仪可与AI360全景影像系统中的其他传感器(如摄像头、雷达等)融合使用。通过多传感器数据的融合与分析,提供更全MIAN、准确的车辆周边环境信息,进一步提升驾驶安全性。四、结论车载红外热像仪在AI360全景影像系统中的应用,不仅增强了驾驶安全性,还提高了车辆的智能化水平。这一技术的融合使用,为现代汽车的驾驶安全和智能化发展提供了有力的支持。未来,随着技术的不断进步和应用领域的拓展,车载红外热像仪有望在更多领域发挥重要作用。
汽车360度全景影像是前后左右各一个摄像头,在行车过程中可实时监测四周情况,不能替代行车记录仪,而且也没有存储和回放功能,如果想当行车记录仪使用,可以增加一个行车记录仪模块。汽车行车记录仪,一般是前后记录仪汽车行驶画面(轨迹),对车主开车不能提供车外的帮助,较基本的倒车影像也难以起到作用。360全景影像,这款产品功能比较大,前后左右4个180度超大广角经过超级算法计算拼接成360度无死角的全景影像全方面的为提车提供车外实况,不管是汽车行驶的窄路还是会车或是人流量较大的集市都很好的在车内实时查看车外的环境。360全景还有前视影像,右侧影像,左侧影像和后视倒车影像。360全景影像是汽车行业较先进的产品,他依靠一个主机,加四个摄像头,就可以组成一个单独的全景系统。

(上篇)透明360全景影像系统在挖掘机上的应用,通过多摄像头合成与透SHI算法,为驾驶员提供无盲区视野,其技术实现与优势可拆解如下:
一、系统核XIN原理多摄像头阵列布局:在挖掘机车身关键位置(如前格栅、后臂、侧门、车顶)安装4-6个超广角摄像头,覆盖360°环境。抗环境设计:采用IP69K防水、防抖摄像头,适应工地尘土、振动、冲击等恶劣条件。实时图像拼接通过边缘计算单元将多路视频流合成全景鸟瞰图,结合SLAM算法动态校准车身姿态(如动臂角度变化),消除机械结构遮挡。透SHI投影技术将合成图像通过“虚拟透明”算法映射到驾驶舱显示屏,使驾驶员仿佛透过车身直接观察周围环境,解决传统后视镜盲区问题。
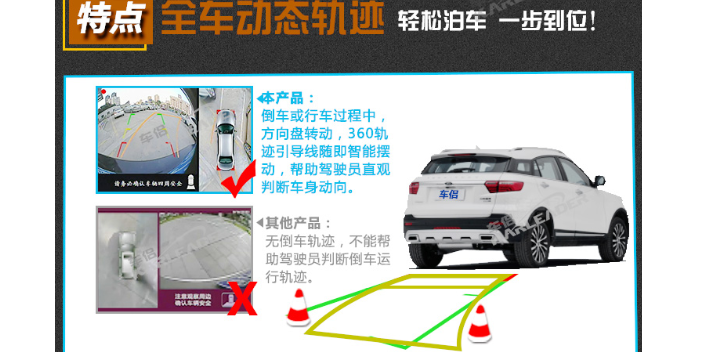
二、关键功能实现动态盲区补偿当动臂或铲斗遮挡视线时,系统自动增强对应区域摄像头的分辨率,并通过AR叠加警示框提示障碍物距离。智能辅助线在全景画面中生成动态辅助线(如挖掘轨迹预测、安全距离提示),辅助驾驶员精细操作。夜间增强模式配备红外摄像头与热成像模块,在低光照条件下自动切换,确保全天候可视性。
三、安装与集成要点硬件部署摄像头位置:需避开液压油管、铰接点等高频振动区域,优先安装于刚性支架。 已有倒车影像能加装360全景吗?汽车360全景影像系统厂家直销
360度全景倒车影像系统能够解决很多车主在倒车过程中遇到刮蹭,装凹或刮伤的问题。渣土车8路360全景影像系统销售
(上篇)车载AI360全景影像系统的技术原理:通过集成AI算法,增加预警与物体识别功能,其实现技术原理主要包括以下几个方面:一、图像采集与传输摄像头布局:车载360全景影像系统通常会在车辆的前、后、左、右以及车顶或后视镜等位置安装多个摄像头,以捕捉车辆周围的图像。图像传输:摄像头捕捉到的图像数据会被实时传输到车载处理器或显示屏上。这些图像数据会经过压缩和编码处理,以便进行实时传输和后续处理。二、图像拼接与融合图像拼接技术:车载处理器会对来自不同摄像头的图像数据进行拼接,形成一个完整的360度全景视图。这个过程涉及到图像校正、图像融合等处理,以确保终合成的全景图像能够准确地反映车辆周围的实际情况。图像校正:由于摄像头的位置和角度不同,所拍摄的图像会存在一定的畸变,如T视畸变和径向畸变等。因此,需要对图像进行适当的校正处理,以消除这些畸变。图像融合:将校正后的图像进行融合处理,形成一个无缝的全景画面。这个过程可能涉及到图像对齐、裁剪、旋转等操作,以确保图像能够无缝地拼接在一起。三、AI算法集成与物体识别AI算法应用:在图像拼接和融合的基础上,集成AI算法进行物体识别和预警。
因字数受限,待续,敬请看下篇。 渣土车8路360全景影像系统销售