- 品牌
- zc
- 型号
- 2-1
- 类型
- 教学设备
- 材质
- 金属
- 可否折叠
- 可
- 风格
- 日式,简约
- 适用场合
- 专业生产教学仪器、教学设备、教学模型、教学仪器设备、教学挂图
- 产地
- 温州
- 厂家
- 温州政宠教仪有限公司
旋风除尘实验装置ZC8-6产品标题产品简介首页ꄲ产品分类ꄲ8.环境工程实验装置ꄲ旋风除尘实验装置一、设备特点:1.设备布局合理、美观,结构清晰,整体感强。2.旋风分离器由透明有机玻璃制成,可直接观察在不同工况条件下粉尘在分离器中的工作状态。二、实验目的:1.观察含粉尘的气流在旋风分离器内的运动状况。2.了解旋风分离器的除尘原理,计算除尘效率。三、主要配置:粉尘加入瓶、粉尘接受瓶、风机、旋风分离器、风量调节阀、电路系统、不锈钢框架、屏。四、技术参数:1.环境温度:5℃~40℃,配电:220V,250W。2.粉尘加入瓶、粉尘接受瓶等均由304不锈钢制成。3.除尘效率:70%~80%;气体含尘浓度:<50g/m3;处理粉尘粒径:20~200μm。4.机:风量480m3/h,风压1300Pa,功率250W,转速2800r/min。5.标准旋风分离器:直径Φ200mm,分离器内筒出口连接收集装置,收集密度小的物料,有机玻璃制成。6.尾气收集装置含收集罩和收集管道。7.屏和框架均为304不锈钢,结构紧凑,外形美观,流程简单,操作方便。8.外形尺寸:1200×500×1600mm,框架为可移动式设计,带脚轮及禁锢脚。 温州政宠教仪有限公司致力于提供实验装置,期待您的光临!陕西超滤膜分离实验装置价格表

电路01具有过载保护的正转、02双重互锁的正反转、03生产机械行程电路、04自耦降压起动、05接触器星形、三角形、06时间继电器、07三相电动机机械制动电路、08电动机反接制动电路、09有变压器全波整流能耗制动电路、10接触器的双速电动机调速电路、12利用电流继电器绕线式异步电动机起动线路、c620车床电气,电动葫芦,z35摇臂钻床(3)排故01具有过载保护的正转排故、02双重互锁的正反转排故、03生产机械行程电路排故、04自耦降压起动排故、05接触器星形、三角形排故、06时间继电器排故、07三相电动机机械制动电路排故、08电动机反接制动电路排故、09有变压器全波整流能耗制动电路排故、10接触器的双速电动机调速电路排故、12利用电流继电器绕线式异步电动机起动线路排故、13c620车床电气排故、两地连线等(4)原理变压器工作原理、步进电动机工作原理、单向异步电动机工作原理、电度表工作原理、两地灯电路、钳型电流表原理、热继电器工作原理、伺服电动机工作原理、兆欧表工作原理、塑壳式断路器工作原理、交流接触器原理等(5)电机拆装,三相异步机拆分、单相异步机拆分等(6)仪器仪表的使用万用表、双踪示波器、信号发生器、频谱仪、钳形表等3)气动回路。 陕西多釜串联实验装置业务实验装置,就选温州政宠教仪有限公司,有想法的可以来电咨询!

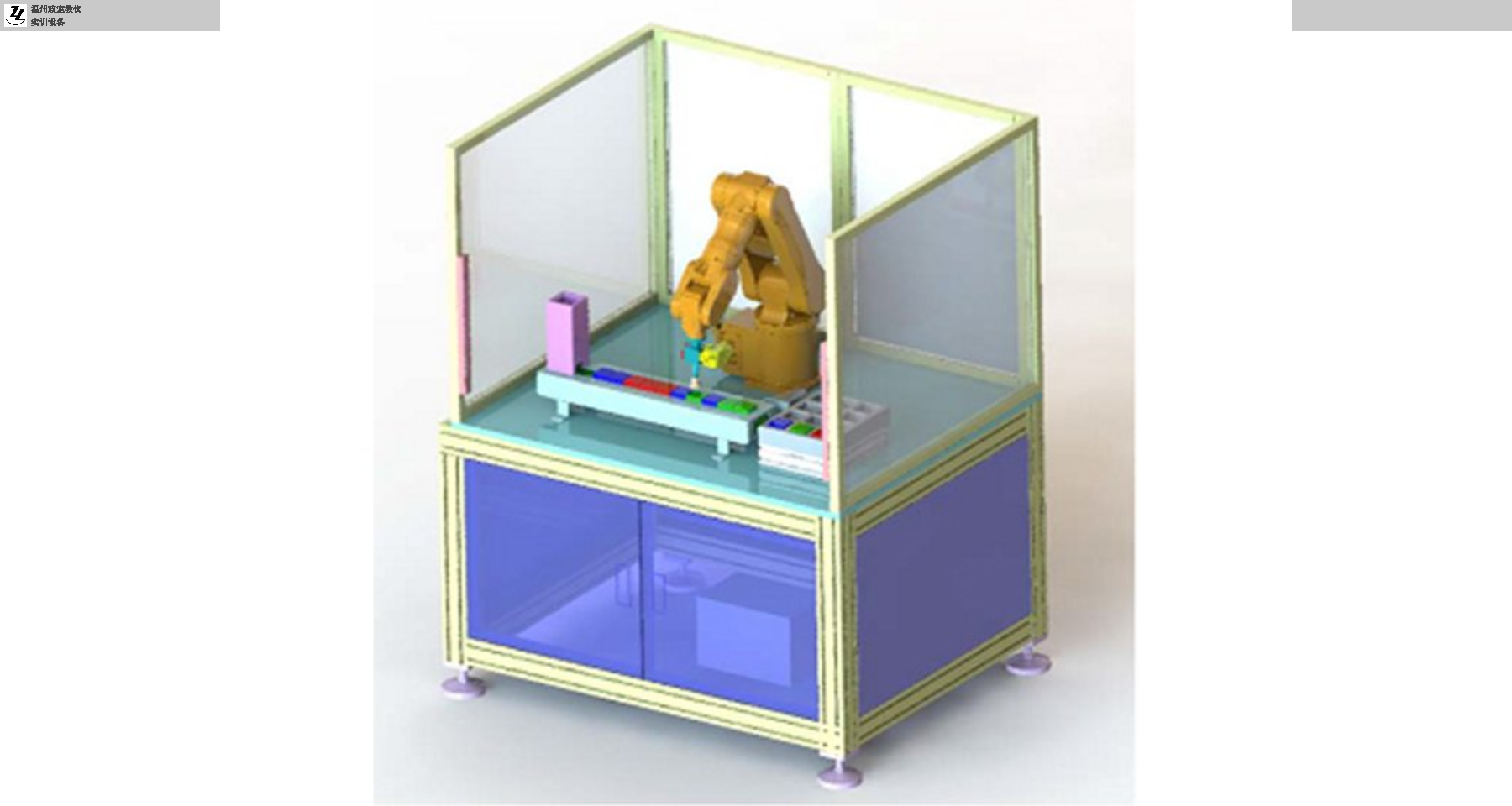
短路保护额定功率:≤2KW环境温度:-10~50℃相对温度:≤85%外形尺寸:L2200~3000mm×W2200~3000mm×H2000mm(参考)四、产品配置参数:1、工业机器人本体系统配置参数:1)功能、参数及特点描述:①ABB机器人IRB120-3/,负载3kg,臂展,重复精度;铝合金马达,结构轻巧,功率强劲,确保度,本体重25kg;多角度安装,可使其不受任何空间限制;气路管路与用户信号线缆由机身底脚至手腕全部嵌入机器人内部,利于机器人集成;②配套IRC5工业紧凑型器,节省占地空间,AC220V电源,外置式信号接头,简化了调试步骤;③带RobotStudio机器人软件,可提升编程速度,软件带功能,可随时验证编程效果;④本体到器3~7m长电缆;⑤示教器具中文操作界面,本体到示教器3~7m长线缆;⑥带DC24V16in/16outIO卡;⑦底座由20mm厚钢板与Φ160mm钢管焊接而成,表面发黑处理,坚固耐用,能防止锈蚀;底板有6组膨胀螺丝与地面固定,保证安装的稳固,连接机器人的腰型孔设计特别适合小型机器人安装,并能满足多种同类型机器人安装使用;⑧配置3组电磁阀组,为机器人安装不同夹具提供动力,连接方便。
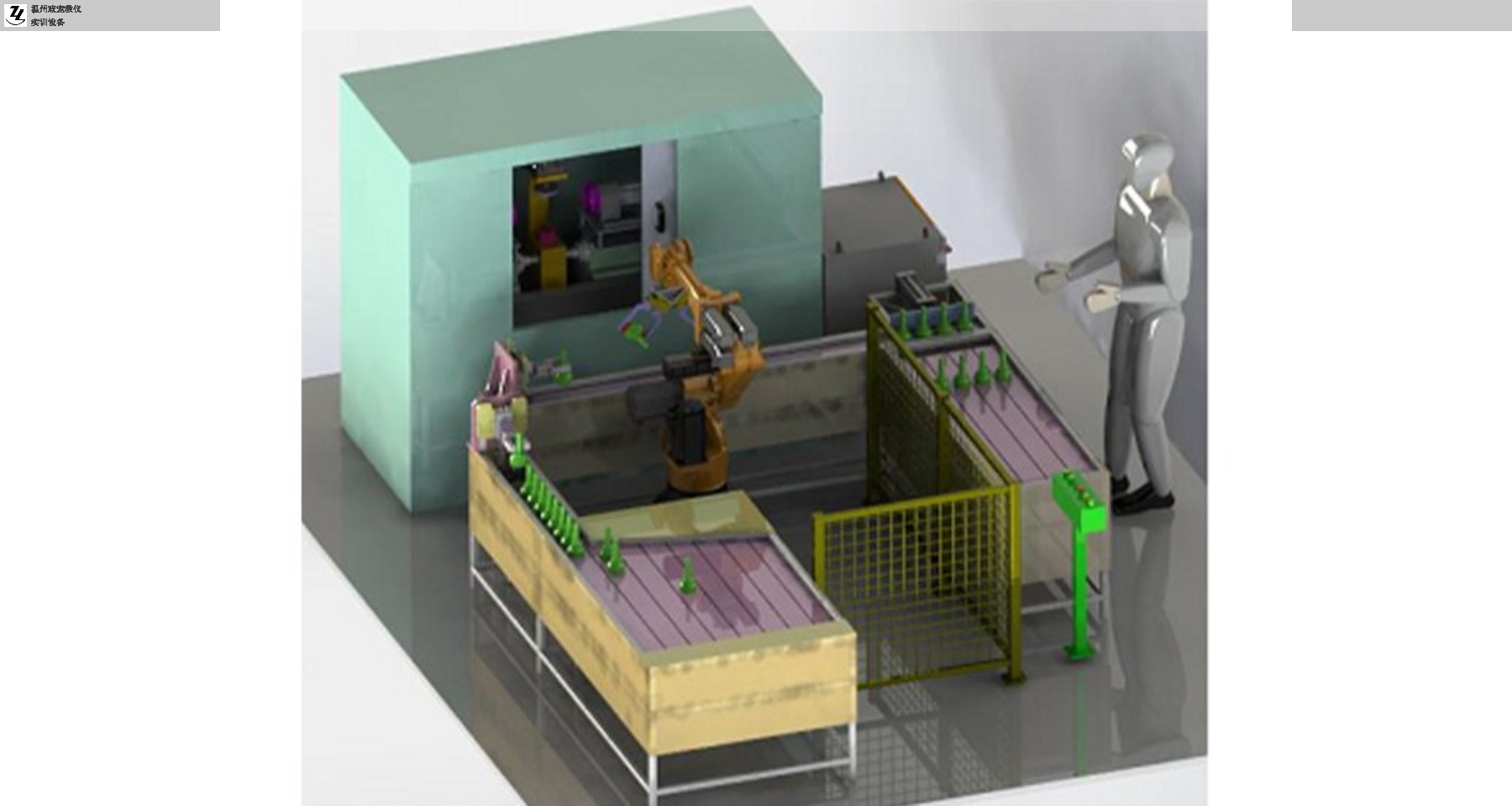
一、机器人光电一体化实训装置概述机器人光机电一体化分拣实训装置是为了尽快的适应各个领域的发展,能在少的课时内高质量的完成内容多、理论结合实际结合性强、技术涉及面广的机电一体化教学课程。符合各院校的教学实验需求。培养出大量的能熟练掌握及开发运用机器人、PLC、变频器、触摸屏、传感器检测、气动执行、机械设计装配调试等技术的技术工人、技术员、工程师、输送到各条战线。高速分拣实训系统。以下简称:高速分拣系统。它实现了生产线的传感检测、传输处理、智能、与执行驱动。它涉及到机器人技术、机械技术、微电子技术、电工电子技术、传感测试技术、接口技术、信息变换技术、网络通信技术等机电一体化的基础知识和基本机电技能要求。本系统在铝合金导轨式实训台上安装有送料、机器人搬运、材料分拣的三个基本工作机构单元,构成一个典型的自动生产线的机械平台。系统机构采用了气缸驱动、变频器调速驱动、直流电机驱动。系统的方式采用了PLC及触摸屏等技术。采用模块组合式的结构,各工作单元是相对的模块,并采用了标准结构和抽屉式模块,具有较强的互换性。二、产品性能要求1、高速分拣系统机器人系统具有6个自由度,串联关节型工业机器人。
实验装置,就选温州政宠教仪有限公司,让您满意,期待您的光临!
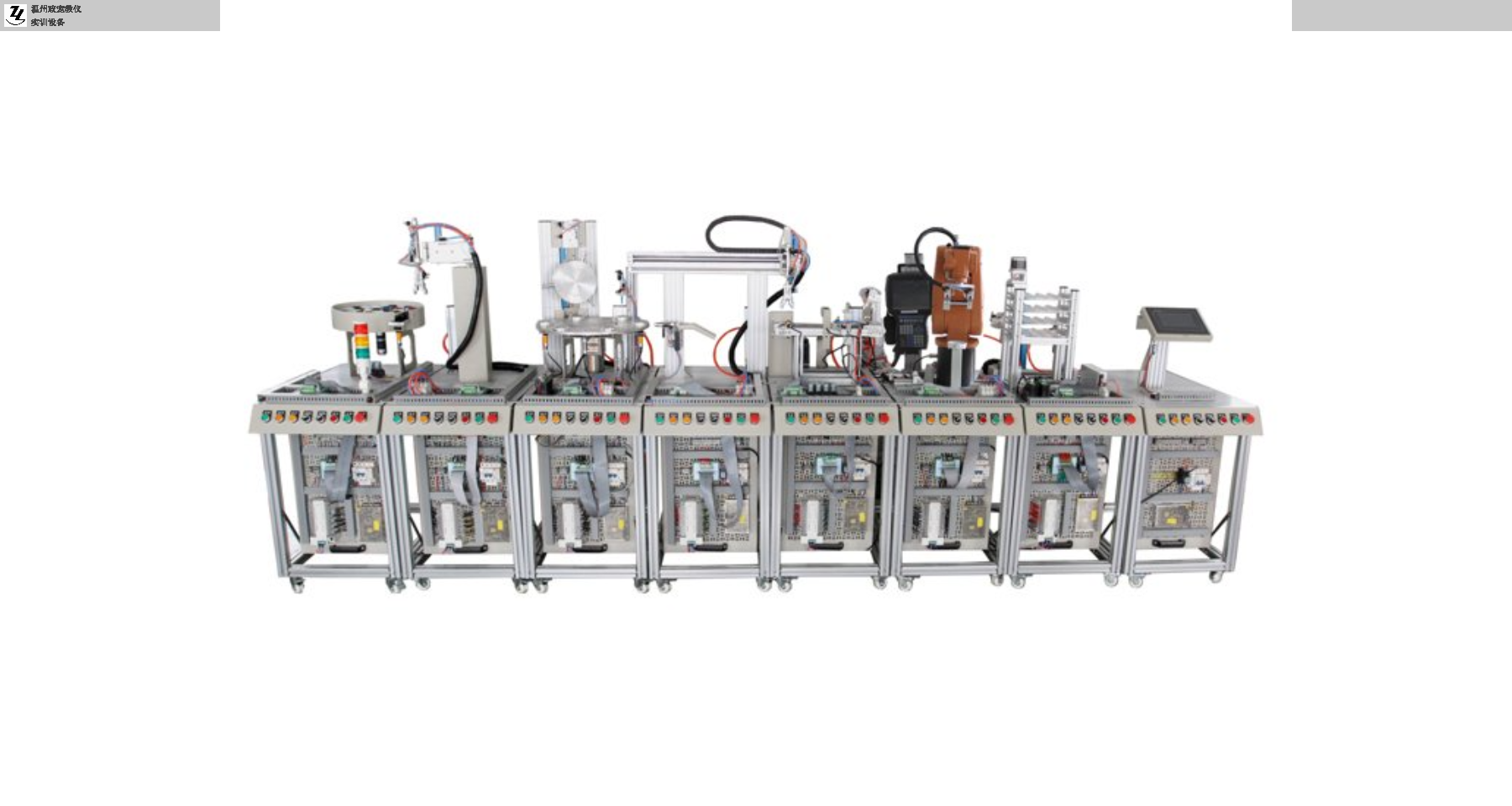
2)直齿轮传动机构的设计及特性研究(3)锥齿轮传动机构的设计及特性研究(4)直线导轨的设计及特性研究(5)滚珠丝杆的特性研究及应用7.故障检测技术技能培训(1)程序故障设置的排除训练(2)参数故障设置的排除训练(3)电气接线故障设置的排除训练(4)机械故障设置的排除训练8.网络通讯技术和PROFIBUS总线技术(1)网络通讯基础的原理与应用(2)PROFIBUS-DP模块的研究与应用(ROFIBUS通讯协议的研究与应用(4)PROFIBUS主站与从站之间的通讯研究四、系统组成1.系统的硬件由九个基本单元站组成(一)总控平台总控平台主要由三相电网电压指示、电源部分、主机、状态指示灯、二位选择开关、启动和停止开关、急停开关、复位开关、,主要完成监视各分站的工作状态并协调各站运行,完成工业网络的集成。(二)上料单元上料单元主要由料斗、回转台、螺旋导料机构、直流减速电机、工件滑道、计数电容开关、光电开关等组成。温州政宠教仪有限公司为您提供实验装置,期待您的光临!陕西多釜串联实验装置现货
温州政宠教仪有限公司致力于提供实验装置,欢迎您的来电哦!陕西超滤膜分离实验装置价格表
工作半径为500mm,负载5kg,重复精度±,机器人本体重量28kg,第1轴工作范围为+170°/-170°,旋转速度370°/s,第2轴工作范围为+110°/-110°,旋转速度370°/s,第3轴工作范围为+40°/-220°,旋转速度430°/s,第4轴工作范围为+185°/-185°,旋转速度300°/s,第5轴工作范围为+125°/-125°,旋转速度460°/s,第6轴工作范围为+360°/-360°,旋转速度600°/s。工业机器人示教器及驱控一体机。2、分拣系统配备有多种类传感器★3、理实一体化智能故障考核软件(需提供认可的自主知识产权的证明材料和现场演示)理实一体化智能故障考核软件界面,可实现故障设置、故障模拟、学员考核与评份、故障排除等功能。故障设置和考核系统采用MCU技术RAM处理芯片的数字化集成电路板与配套无线故障设置系统,系统稳定。模块(PC终端或手持移动终端)和驱动模块(智能故障设置驱动盒)分离,避免复杂连线,系统更加可靠。驱动模块内置智能故障设置系统,配有新型无线数据传输模块(可插拔型)和RS232串行通讯接口,可无线组网通讯和RS232有线通讯。手持移动终端采用,中文菜单式触控操作界面,人机对话友好。手持移动终端可任意一台带驱动模块的实训设备。手持移动终端不联网时可作单机操作。 陕西超滤膜分离实验装置价格表

- 陕西精馏实验装置明细 2024-12-26
- 陕西实验装置案例 2024-12-26
- 陕西反渗透实验装置新报价 2024-12-26
- 陕西流化床干燥实验装置明细 2024-12-26
- 浙江固体流态化演示实验装置供应商 2024-12-26
- 恒压过滤实验装置批发价 2024-12-26
- 浙江填料吸收实验装置客服电话 2024-12-26
- 空化机理实验装置现货 2024-12-26