- 品牌
- 上海洲和
- 型号
- 室内 室外 防爆
- 类型
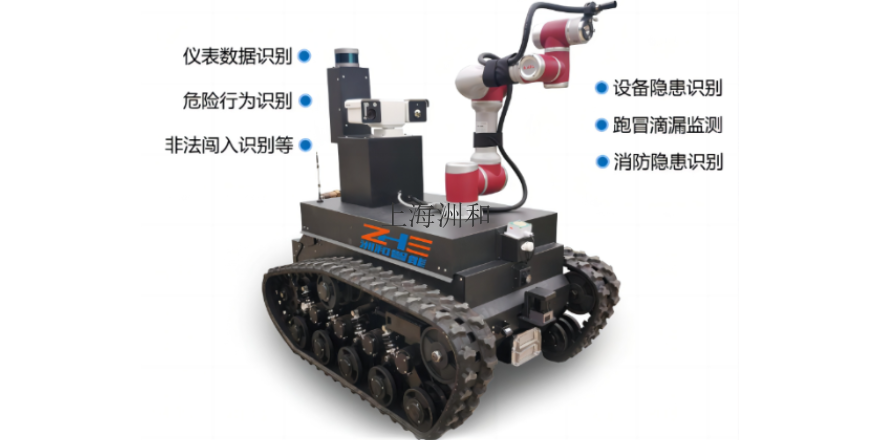
- 金属探测器,火灾探测器,红外探测器,幕帘式探测器,气体探测器,手持式探测器,AI识别系统
- 加工定制
- 是
- 适用范围
- 网吧,KTV,法院,监狱,电力化工,工业园区,学校厂房,机场铁路,冶金炼钢等,铜线厂,手机厂
机器人的人脸识别功能是指通过摄像头等传感器捕捉并分析人脸图像信息,从而识别个体身份的一种技术。具体来说,它包括以下几个步骤:捕捉图像:机器人可以通过摄像头等传感器捕捉到包含人脸的图像。这些图像可以是静止的也可以是动态的,可以是正面也可以是侧面的。人脸检测:在捕捉到图像后,机器人需要检测出其中的人脸部分。这可以通过人脸检测算法来实现,这种算法可以自动识别并框出图像中的人脸部分。人脸特征提取:一旦机器人检测到人脸,它就可以从人脸图像中提取出特征。这些特征包括但不限于眼睛、嘴巴、眉毛、鼻子等部位的形状、大小、位置等信息。轨道巡检机器人,就选上海洲和智能科技有限公司,用户的信赖之选,有需求可以来电咨询!甘肃电力巡检机器人工程

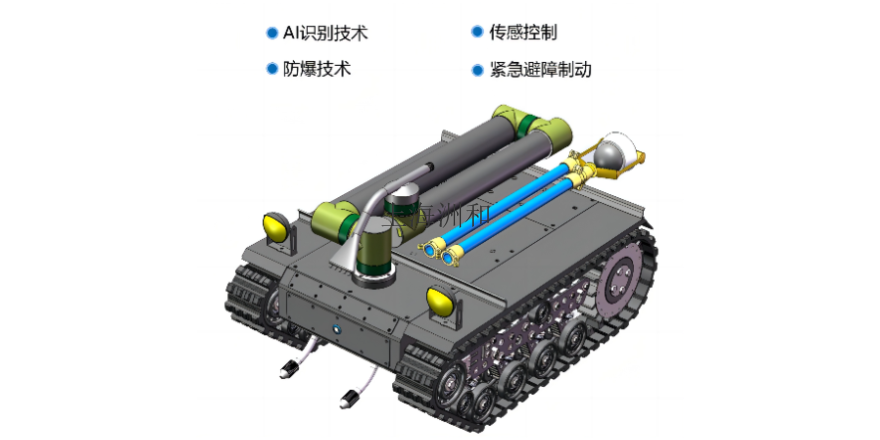
洲和智能科技专注于研发具有适用于各种工业领域的智能安全巡检机器人及特种环境机器人产品。团队凭借先进专业的技术实力和创新能力,以满足不断发展的工业自动化、智能化需求。公司的产品主要为工业安全巡检机器人和特种环境机器人。工业安全巡检机器人是一种能够在工业生产环境中自动执行安全巡检任务的智能设备,能够高效、准确地发现并预警各种安全隐患,有效提高巡检效率,减少人工开支。特种环境机器人则是针对各种特殊应用场景设计的机器人,能够在极端环境下完成危险或者复杂的工作,如水下作业、密闭空间、狭窄空间等。这种机器人能够在人无法接近的环境中进行作业,极大地保障了人员的安全。洲和团队深入理解工业领域客户的需求和痛点。我们能够提供符合客户要求的定制化机器人解决方案,帮助客户解决各种工业生产过程中的瓶颈及难题,显著提高生产效率。吉林智能巡检机器人方案上海洲和智能科技有限公司为您提供 AI巡检机器人,有需求可以来电咨询!
定位模块:可以通过对激光雷达(Laserradar)和起宽带UWB)数据的解析来获得机器人的相关定位信息,但其会优先借助波算法(Filteringalgorithm)来对UWB的数据予以优化,从而使所获取的定位信息更加精确稳定。还可以运用ROS的ACML包对线管数据再次加以计算,从而获得定位信息。该模块既能够对两个定位信息予以单独使用,也可以融合使用。导航模块:主要分为手动控制、局部路径规划以及全局路径规划,通过局部、全局两个子模块彼此间的协同配合能实现实时路径规划。但当机器人接收到手动控制命令后,此时机器人的控制权将被工作人员所接管,从而自动切换至手动模式状态,以供工作人员手动规划机器人的巡检路线。巡检模块:机器人在接收到巡检任务后将自动规划路线开始巡检工作,期间依靠多个传感器来判断水平方向是否存在障碍物或不可触碰高危设备。同时根据巡检任务的实际需要,相关指令能够及时传达至摄像头以及升降云台,从而对其升降高度以及拍摄角度进行相应调整,确保拍摄效果。巡检功能主要还能完成危险情况紧急制动、通过升降门、设备拍照、手动控制等等机器人功能。
检测潜在问题:巡检机器人可以检测环境中的潜在问题,如设备的故障、异常情况等,提前发现并预警,避免问题扩大带来更大的损失。远程监控和管理:巡检机器人可以通过云平台进行远程监控和管理,方便管理人员随时随地查看机器人的工作状态和环境参数,提高管理效率。提高工作效率和稳定性:巡检机器人可以24小时不间断地工作,不受时间和地点限制,能够提高环境监测的工作效率和稳定性。综上所述,巡检机器人在环境监测方面具有重要的作用,可以提供准确、实时的环境监测数据,为环境管理和保护提供重要的参考和支持。上海洲和智能科技有限公司致力于提供煤矿巡检机器人,有想法可以来我司咨询!

巡检机器人是一种能够自主或半自主地对各种环境和设备进行巡回检查的机器人。巡检机器人的解决方案:巡检机器人主要由前端机器人模块与后台数据分析模块组成,其中机器人载体负责巡检相关的路径规划与数据采集,云端服务器负责相关巡检任务分析与反馈。针对定位频繁失败造成死机的问题,应修改定位失败处置流程,当智能巡检机器人认为定位失效时,应重新定位一次仍失败,就不再重新定位,而是向运维人员发信,让运维人员远程控制智能巡检机器人越过定位失效区域。智能机器巡检机器人,就选上海洲和智能科技有限公司,有需求可以来电咨询!重庆冶金巡检机器人定制
轨道巡检机器人,就选上海洲和智能科技有限公司,有想法的可以来电咨询!甘肃电力巡检机器人工程
巡检机器人本地监控后台。巡检机器人本地监控后台位于机器人巡检区域附近,巡检机器人本地监控后台由一台服务器构成,通过无线方式,用于实现对防爆轮式巡检机器人的无线远程控制、参数设置以及完成与巡检机器人远程工作站的数据传输。巡检机器人远程工作站。巡检机器人远程工作站包括:上位机、显示器和相应的监控软件,用于实时显示巡检设备的视频图像、报警信息、机器人位置等数据。上位机监控软件可采用C++语言进行开发设计,主要对机器人上传数据进行分析处理、异常报警及记录存档,实时刷新界面,浏览视频;机器人到达巡检位后,上传到位信号及点检位卡片号,通过卡片号调用相应云台预制点,初步寻找仪表或者阀门位置,通过分析确定目标在画面中的位置进行闭环调节,再次捕获清晰的目标照片进行状态、数据识别。甘肃电力巡检机器人工程

巡检机器人的远程操控中心利用先进的无线通信技术,与控制软件无缝对接,实现了与机器人本地监控平台的实时信息交互。通过这一系统,不仅能够远程操控巡检机器人的行动,还能在操控中心的显示屏上直接查看机器人采集的高清视频和各类数据信息。远程操控中心宛如机器人的“智能中心”,不仅发出行动指令,还负责解析机器人传回的视觉、音频等感知信息。一旦发现设备异常,巡检机器人和远程操控中心会同时发出声光报警,迅速通知用户进行检查维修,确保问题得到及时解决。此外,远程操控中心还具备强大的数据管理功能,能够实时记录报警信息,形成历史数据库。用户可根据日期或设备类型轻松查询设备状态和存档图片,为设备的长期维护和管理提供了有...
- 西藏煤矿巡检机器人技术 2024-12-10
- 云南防爆巡检机器人报价 2024-12-10
- 北京城市巡检机器人方案设计 2024-12-10
- 自主研发巡检机器人造价 2024-12-10
- 新疆巡检机器人公司 2024-12-10
- 辽宁电力巡检机器人价格 2024-12-10
- 黑龙江园区巡检机器人物联网系统 2024-12-09
- 青海电力巡检机器人方案 2024-12-09
- 新疆室内巡检机器人方案设计 2024-12-09
- 广西冶金巡检机器人定制 2024-12-09

- 辽宁电力化工巡检机器人方案设计 2024-12-08
- 内蒙古园区巡检机器人施工方案 2024-12-08
- 宁夏室外巡检机器人物联网系统 2024-12-08
- 安徽电力化工巡检机器人方案 2024-12-07
- 云南农村巡检机器人方案设计 2024-12-07
- 陕西巡检机器人工程 2024-12-07





- 智能气体探测仪ODM 12-29
- 智能气体监测器高防护等级IP 12-29
- 智能气体传感器哪家好 12-28
- 壁挂式气体探测仪高防护等级IP66/ 12-28
- 煤化工气体探测仪厂商 12-28
- 智能气体探测仪哪家好 12-28
- 石油气体报警器怎么选 12-28
- 半导体气体分析仪 12-28
- 有害气体监测器OEM 12-28
- 石油气体传感器价格 12-28