
工业自动化生产对高精度定位和运动控制的需...

在现代对抗中,导弹的精确打击能力至关重要...

惯性导航系统在陆地车辆中的应用:在陆地车...

惯性导航系统在康复医疗中的应用:在康复医...
在复杂的电磁环境中,惯性导航系统宛如一座...
随着无人机技术的飞速发展,其应用场景日益...

惯性导航系统在航天领域的关键作用:航天探...

惯性导航系统在虚拟现实与增强现实中的应用...
当前,惯性导航系统的全球市场呈现出多元化...

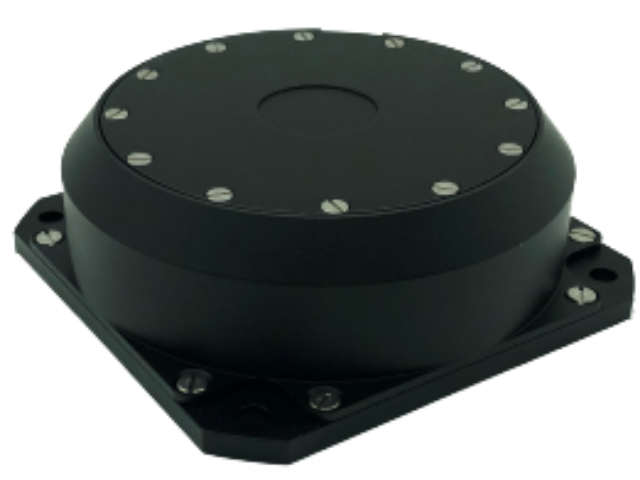
相较传统陀螺仪,光纤陀螺仪在精度的赛道上...
零偏和零漂 零偏是输入角速度为零(即陀螺...
随着科技浪潮汹涌澎湃地推进,光纤陀螺仪毅...